
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

வீடு
>
தயாரிப்புகள் > மூடிய லூப் ஸ்டெப்பர் மோட்டார் > 3 கட்ட மூடிய லூப் ஸ்டெப்பர் மோட்டார் > 57 தொடர் 3 நிலை Nema23 மூடிய லூப் ஸ்டெப்பர் மோட்டார்
தயாரிப்புகள்
- ஏசி சர்வோ மோட்டார்
- டிசி சர்வோ மோட்டார்
- மூடிய லூப் ஸ்டெப்பர் மோட்டார்
- ஹைபர்ட் ஸ்டெப்பர் மோட்டார்
- ஹைபர்ட் ஸ்டெப்பர் மோட்டார் டிரைவர்
- மூடிய லூப் ஸ்டெப்பர் மோட்டார் டிரைவர்
- ஏசி சர்வோ மோட்டார் டிரைவர்
- ஒருங்கிணைந்த ஸ்டெப்பர் மோட்டார்
- டிசி சர்வோ மோட்டார் டிரைவர்
- திருகு மோட்டார்
- RS485 அல்லது CAN அல்லது Ethercat பஸ் வகை ஸ்டெப்பர் டிரைவர்
- கிரக குறைப்பான்
- பிஎல்சி கன்ட்ரோலர்
- HMI தொடுதிரை
- ஈதர்கேட் ஏசி சர்வோ மோட்டார் டிரைவர் கிட்
- A8 AC சர்வோ மோட்டார் டிரைவர் கிட்
- ஒருங்கிணைந்த சர்வோ மோட்டார்
புதிய தயாரிப்புகள்
 லிச்சுவான் ஏசி சர்வோ மோட்டார் டிரைவர்கள் கிட் உயர் சக்தி 235N.m 37KW AC380V 73A 1500/2000RPM IP65
லிச்சுவான் ஏசி சர்வோ மோட்டார் டிரைவர்கள் கிட் உயர் சக்தி 235N.m 37KW AC380V 73A 1500/2000RPM IP65 லிச்சுவான் ஏசி சர்வோ மோட்டார் டிரைவர்கள் கிட் உயர் சக்தி 191N.m 30KW AC380V 52A 1500/2000RPM IP65
லிச்சுவான் ஏசி சர்வோ மோட்டார் டிரைவர்கள் கிட் உயர் சக்தி 191N.m 30KW AC380V 52A 1500/2000RPM IP65 லிச்சுவான் ஏசி சர்வோ மோட்டார் டிரைவர்கள் கிட் உயர் சக்தி 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65
லிச்சுவான் ஏசி சர்வோ மோட்டார் டிரைவர்கள் கிட் உயர் சக்தி 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65 லிச்சுவான் ஏசி சர்வோ மோட்டார் டிரைவர்கள் கிட் உயர் சக்தி 88N.m 18.5KW AC380V 31.6A 1500/2000RPM IP65
லிச்சுவான் ஏசி சர்வோ மோட்டார் டிரைவர்கள் கிட் உயர் சக்தி 88N.m 18.5KW AC380V 31.6A 1500/2000RPM IP65- அனைத்து புதிய தயாரிப்புகள்

57 தொடர் 3 நிலை Nema23 மூடிய லூப் ஸ்டெப்பர் மோட்டார்
Hot Sale China 57 Series 3 Phase Nema23 Closed Loop Stepper Motor இலவச மாதிரி உற்பத்தியாளர்கள் மற்றும் சப்ளையர்கள்.
விசாரணையை அனுப்பு
தயாரிப்பு விளக்கம்
LICHUAN® உங்களை எங்கள் தொழிற்சாலையிலிருந்து 57 தொடர் 3 கட்ட Nema23 மூடிய லூப் ஸ்டெப்பர் மோட்டார் தொடருக்கு அன்புடன் வரவேற்கிறோம். எங்கள் தயாரிப்புகள் CE சான்றளிக்கப்பட்டவை மற்றும் தற்போது பெரிய அளவிலான தொழிற்சாலை சரக்குகளைக் கொண்டுள்ளன. லிச்சுவான் தொழிற்சாலைக்கு 14 ஆண்டுகளுக்கும் மேலான உற்பத்தி அனுபவம் உள்ளது. நாங்கள் OEM&ODM ஐ ஆதரிக்கிறோம், நாங்கள் உங்களுக்கு நல்ல சேவை மற்றும் தொழிற்சாலை தள்ளுபடி விலைகளை வழங்குவோம். LICHUAN இல் சேர அதிகமான விநியோகஸ்தர்களை வரவேற்கிறோம்.
57 சீரிஸ் 3 ஃபேஸ் நேமா23 க்ளோஸ்டு லூப் ஸ்டெப்பர் மோட்டார், உயர்தர மூலப்பொருட்களின் பயன்பாடு மற்றும் உயர்தர நிரந்தர காந்த சிலிக்கான் ஸ்டீல், 1000-லைன் ஹை-பிரிசிஷன் என்கோடருடன், ஓப்பன்-லூப் ஸ்டெப்பர் மோட்டார் ஸ்டெப்பிங் சிக்கல்களை முழுமையாக சமாளிக்கிறது. மோட்டார் அதிவேக செயல்திறன், பாரம்பரிய படிப்படியான இயக்கி நிரல் மேம்படுத்தலை எளிதாக்க, சர்வோ மோட்டாருடன் ஒப்பிடும்போது செலவுக் குறைப்பு 50% க்கும் அதிகமாக குறைக்கப்பட்டது. மோட்டார் நீளம் 77mm ~ 123mm, முறுக்கு வரம்பு: 1N.m ~ 3N.m, மோட்டார் தண்டு விட்டம் 8mm. 57 தொடர் 3 கட்ட Nema23 க்ளோஸ்டு லூப் ஸ்டெப்பர் மோட்டார் 4 வகை இயக்கிக்கு பொருத்தமாக இருக்கும்:RS485. கேனோபன். ஈதர்கேட். துடிப்பு கட்டுப்பாட்டு இயக்கிகள்.
மின்சார செயல்திறன் அளவுருக்கள்
| பொருள் | நுணுக்கங்கள் |
| படி கோணம் துல்லியம் | ±5%(முழு படி) |
| எதிர்ப்புத் துல்லியம் | ±10%(20℃) |
| தூண்டல் துல்லியம் | ±20%(1KHZ) |
| வெப்பநிலை உயர்வு | 80℃ அதிகபட்சம் (மதிப்பிடப்பட்ட நடப்பு, 2 கட்ட பவர் ஆன்) |
| சுற்றுப்புற வெப்பநிலை | -20℃~*50℃ |
| காப்பு எதிர்ப்பு | 100MQMin 500VDC |
| மின்கடத்தா வலிமை | 500V ஏசி 1 நிமிடம் |
| அனுமதிக்கக்கூடிய ரேடியல் லோட் | 0.02 மிமீ அதிகபட்சம். (450கிலோட்) |
| அனுமதிக்கக்கூடிய த்ரஸ்ட் லோட் | 0.08 மிமீ அதிகபட்சம். (450கிராம் சுமை) |
| ரேடியல் அதிகபட்ச சுமை | 75N(20மிமீ விளிம்பு மேற்பரப்பில் இருந்து) |
| ஷாஃப்ட் அதிகபட்ச சுமை | 15N |
| தொடர் | படி கோணம்(") |
நீளம் (மிமீ) |
வைத்திருக்கும் முறுக்கு (N.m) |
கட்டம் தற்போதைய (A) |
சுழலும் மந்தநிலை (g.cm²) |
எடை (கிலோ) |
குறியாக்கி தீர்மானம்(PPR) |
| LC57H355 | 1.2 | 77 | 1.0 | 3.5 | 300 | 1.0 | 1000 |
| LC57H380 | 1.2 | 102 | 2.0 | 3.5 | 500 | 1.4 | 1000 |
| LC57H3100 | 1.2 | 123 | 3.0 | 4.0 | 700 | 1.8 | 1000 |
மேலே உள்ளவை பிரதிநிதி தயாரிப்புகள். தயாரிப்புகளை தனிப்பயனாக்கலாம்!
வடிவம் மற்றும் நிறுவல் அளவு (அலகு: மிமீ)
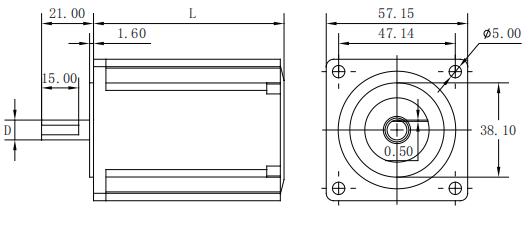
மோட்டார் தண்டு முறை
| மாதிரி | தண்டு விட்டம்(மிமீ) |
தண்டு நீட்டிப்பு(மிமீ) |
தண்டு நீளம்(மிமீ) |
| LC57H355 | f8 | டி-கட் 0.5 x15 | 21 |
| LC57H380 | f8 | டி-கட் 0.5x15 | 21 |
| LC57H3100 | f8 | டி-கட் 0.5x15 | 21 |
மோட்டார் வயரிங் வரைபடம்
மோட்டார் வயர் நிறங்கள்

குறியாக்கியின் வரையறைகள் முன்னணி நிறங்கள்
| 1 | மஞ்சள் | EB+ |
| 2 | பச்சை | EB- |
| 3 | கருப்பு | EA+ |
| 4 | நீலம் | EA- |
| 5 | சிவப்பு | +5VCC |
| 6 | வெள்ளை | EGND |
குறிப்புகள்
1. மோட்டார் மற்றும் டிரைவரை இணைக்கும் போது கட்டங்கள் சரியாக இணைக்கப்பட்டிருக்க வேண்டும்.
2. வெவ்வேறு ஓட்டுநர் நிலைமைகளின் கீழ் மோட்டார் வெளிப்படையான வெப்ப உருவாக்கம் ஏற்படலாம். இயக்கத்தின் போது மோட்டாரின் மேற்பரப்பு வெப்பநிலை 85 ℃ ஐ விட அதிகமாக இருக்க அனுமதிக்கப்படுகிறது.
3.Motor must be positioned by installation rabbet on front cover of motor, attention shall be paid on error matching, and the concentricity between motor shaft and load shall be controlled strictly.
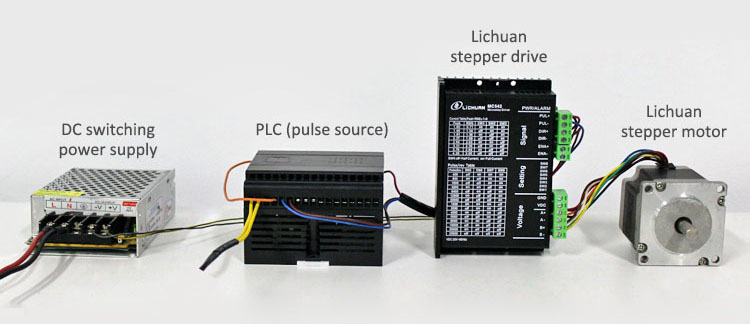
விண்ணப்ப வயரிங் வரைபடம்
ஒரு முழுமையான steppr மோட்டார் கட்டுப்பாட்டு அமைப்பில் கீழே காட்டப்பட்டுள்ள தயாரிப்பு இருக்க வேண்டும்
தயாரிப்பு பேக்கேஜிங்

லிச்சுவான் தொழிற்சாலை தயாரிப்பு தயாரிப்பு இயந்திரம்
-

செதுக்கும் இயந்திரம் -

பூச்சு உபகரணங்கள் -

ஃபைபர் லேஸ்டர் குறிக்கும் இயந்திரம் -

திருகு இயந்திரம் -

சோதனை இயந்திரம் -

UV பிரிண்டர்
-

தானியங்கி சாலிடரிங் இயந்திரம் -

முறுக்கு சோதனை இயந்திரத்தை வைத்திருத்தல் -

திருகு இயந்திரம் -

ஆசிலோகிராஃப் இயந்திரம்
தொழில் பயன்பாடுகள்
-

ரோபோ கை -

லேசர் வெட்டும் இயந்திரம்
-

3டி பிரிண்டிங் -

CNC இயந்திரம் -

தானியங்கி உறுதிமொழி -

Engraving Machine
சூடான குறிச்சொற்கள்: 57 தொடர் 3 நிலை Nema23 மூடப்பட்ட லூப் ஸ்டெப்பர் மோட்டார், சீனா, உற்பத்தியாளர்கள், சப்ளையர்கள், தொழிற்சாலை, தனிப்பயனாக்கப்பட்ட, சீனாவில் தயாரிக்கப்பட்டது, மலிவானது, CE, நீடித்த, தரம்
தொடர்புடைய வகை
விசாரணையை அனுப்பு
தயவுசெய்து உங்கள் விசாரணையை கீழே உள்ள படிவத்தில் கொடுக்க தயங்க வேண்டாம். நாங்கள் உங்களுக்கு 24 மணி நேரத்தில் பதிலளிப்போம்.




